Pre-measuring with an inertial measuring system
When pre-measuring with an inertial measurement system, the relative track position is determined with the aid of an inertial measurement unit (IMU).
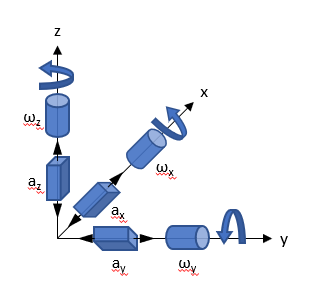
An IMU is a multi-sensor system with which the free motion of a body can be measured in a certain area. With the use of three acceleration sensors positioned perpendicular to each other, the motion of the body along the respective coordinate axis is determined by first calculating the speed through integrating the measured values and then calculating the travelled distance through integrating the measured values a second time. Three gyro compasses record the rotation of the body around the x, y and z axis, so that a three-dimensional trajectory can be derived from the combination of the measured data. If the starting position of the body is known in any coordinate system, the coordinates are available in the designated reference system for each point of the measured trajectory.
© Trimble Railway GmbH
A disadvantage of the system lies in the drift to which the individual IMU sensors are subjected. In this case, drift means that a motion or rotation is detected even though the system is at rest in reality. This drift increases exponentially with continuous duration and leads to an increasing deviation from the actual position. This is countered by measuring synchronization points whose coordinate position is known and thus correcting the drift at regular intervals depending on the absolute accuracy required.

© Trimble Railway GmbH
To record the track position, the IMU is mounted on a track measuring trolley. The track measuring trolley is additionally equipped with a precise inclination sensor as well as a track gauge sensor and a wheel measuring the distance travelled (odometer), so that all relevant track parameters such as cant, gauge and relative track position can be recorded in one operation. In order to integrate the necessary reference to the absolute track position, an additional measuring device, e.g. a profiler, is mounted on the track measuring trolley. The profiler consists of a laser distance meter, which determines the distance between the track measuring trolley and the reference point reflectorless. A red laser dot serves as an alignment aid. The second component is an angle encoder with which the vertical angle between the horizontal reference plane and the reference point can be determined.

© Trimble Railway GmbH
With the profiler, the lateral offset of the track center line and the height offset to the top of the reference rail are determined at the reference point. If the design values at the reference point are compared with the as-built values, the lift and shift values at this track position are identified. In addition, the reference point measurement serves to locate the track measuring trolley, i.e. at which chainage on the track it is currently located. If two successive reference points were measured in this way, the trajectory can be measured between these two points with the IMU. By combining both measurements, lift and shift values according to a design are generated for each point of the trajectory. These can be used as the data source for the automatic guidance of a tamping machine. Analogous to the twin-trolley system, reference points may also be skipped so that productivity increases, but also the basic idea of the long chord method is fulfilled.
![[Translate to English:] Data preparation for tamping machines in Trimble GEDO Office Module Tamp](/fileadmin/user_upload/Vormessen_mit_Inertialmesssystem/Datenaufbereitung.png "[Translate to English:] Data preparation for tamping machines in Trimble GEDO Office Module Tamp")
© Trimble Railway GmbH
Pre-measuring with an inertial measuring system offers several advantages. Since optical measuring equipment is no longer used, there are no restrictions due to visual obstructions or weather-related influences. The system can be operated by only one person. Only for the handling of the device two persons are needed. This not only brings a cost advantage, but also improves safety aspects.
Due to the great speed advantage compared to all other manual measuring methods - the average speed is 3 km/h - the inertial measuring systems are increasingly used when it comes to maintenance and 6-week tamping runs where survey work is usually carried out on live track.
Such a system can also be used on tracks where neither reference points nor design geometry are available. In combination with a GNSS receiver, the track measuring trolley is referenced absolutely in the desired coordinate system and the track trajectory is determined with the IMU. Although the absolute track position is only determined with GNSS accuracy (cm range), the much more relevant inner track geometry is measured highly accurately with the IMU. By doing so, 3D coordinates are obtained in the global reference system, which in turn can serve as the basis for a new track design. With the newly created alignment, the data then can be transferred to the tamping machine again.
During track surveying, the profiler can be used to define new reference points marked along beside the track. When it comes to data evaluation, each new reference point receives coordinates in the same reference system as the new alignment of the track, so that for any subsequent surveying work the GNSS no longer needs to be used. Instead, the new established reference points will be used again.
In friendly cooperation with ©Trimble Railway GmbH

© Trimble Railway GmbH